About me

Hi. I'm based out of Somerville, MA, working at Watts Water to create the future of plumbing. When I'm not engineering or sleeping, I follow my passions for cooking, running, cycling, climbing, and talking about politics.








Hi. I'm based out of Somerville, MA, working at Watts Water to create the future of plumbing. When I'm not engineering or sleeping, I follow my passions for cooking, running, cycling, climbing, and talking about politics.
Copyright © 2020 - Kevin Simon, All Rights Reserved
My career is focused on taking loosely formed ideas and sculpting them into something valuable through a design process. Those ideas vary from high-efficiency pump concepts to high-performance organizations. Design process uses different 'tools' to go from a coarse concept to something real. The tools that I use most often are: analytical estimates, PDEs, CFD/FEA/etc., optimization, stakeholder engagement, DFMA, precision machine design principles, value proposition mapping, co-design, prototyping, and piloting. The trick is to match the tool to the most important hypotheses. Thus, my research is often focused on designing design tools and practices for engineering designers at a range of fidelities.
A skilled engineering designer can use a wide range of analyses to estimate what will likely happen. I am comfortable using scaling laws, analytical solutions, discretized partial differiential equations, and professional grade tools in concert with experimental refinedment to create simulations than answer questions. I bring these tools together with visualization, optimization (or other computational methods for exploring design spaces), and dicussion to move a project forward and define the next stage of refinement.
I am passionate about using technology as a lever to make the changes that I want to see in the world. Since strategy is the process of finding leverage, I am a committed student of technology strategy. I have had the opportunity to be a part of shaping several early-stage technology projects and watching them grow. Likewise, I care about how large organizations stay connected to stakeholders, select technology-development tracks, test value proposition hypotheses, and allocate resources. I practice this regularly in my current role at Watts.
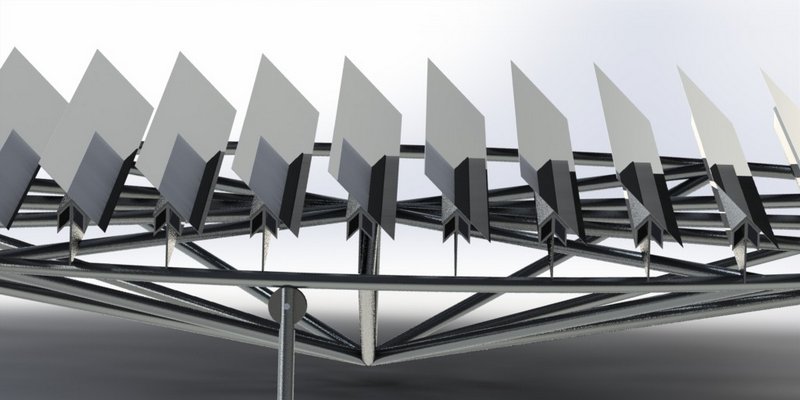
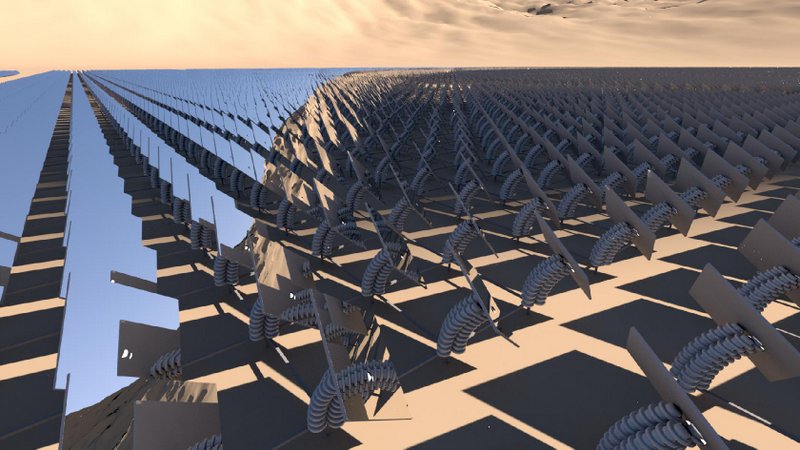
Current mirror and structure size for concentrated solar thermal (CST) fields is driven by amortizing the cost of expensive electo-mechanical motors over large mirrors and structures. Sunfolding is working to reducing the cost of CST power by engineering low-cost, compliant pneumatic actuators with tunable stiffness and acrchitecting a new heliostat field around this new technology. Low cost actuation enables systems with mirrors that are anywhere from 1/10 to 1/100 the size of traditional systems. Smaller mirrors allow for the use of thinner glass, shorter support structures, and less stiffness due to lower wind loads lower to the ground.
The field of compliant mechanism design is young, and the field of compliant pneumatic actuation is even younger. The McKibben actuator and other pneumatically actuated muscles exist, but they are expensive and designed to work as replacements for rigid elements instead of altering how the entire system functions. At Otherlab, I worked to develop the modelling approaches, mechanism design, and manufacturing techniques for this class of actuation.
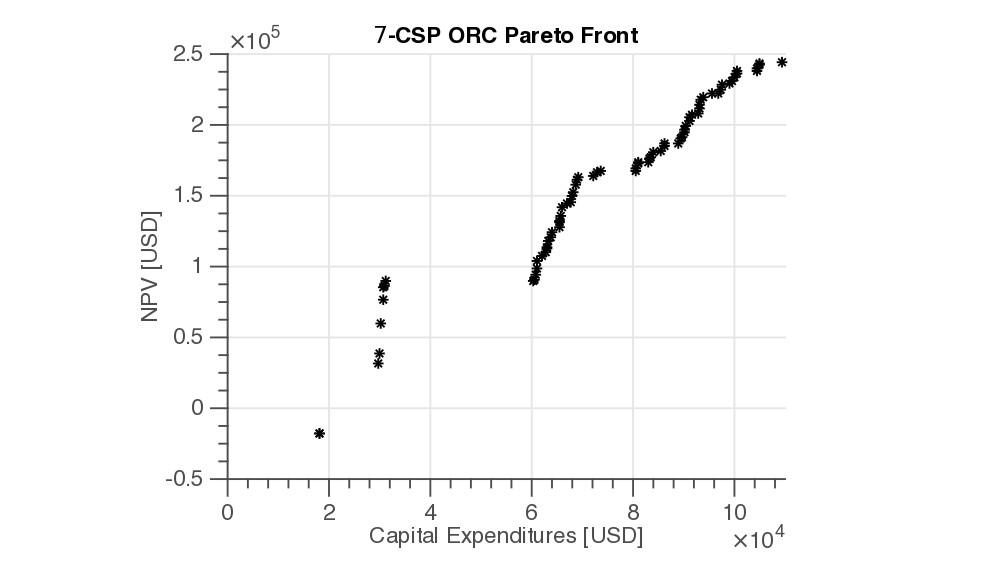
The most disruptive aspect of this solar sctuator design is the technology's ability to provide a high degree of stiffness and accuracy at 1/3 the cost of rigid actuators. In order to ensure that what we developed was worth creating, cost models were integrated into our analysis techniques from square one. Each accuracy/performance model that I developed has been created with the purpose of evaluating the entire system cost.
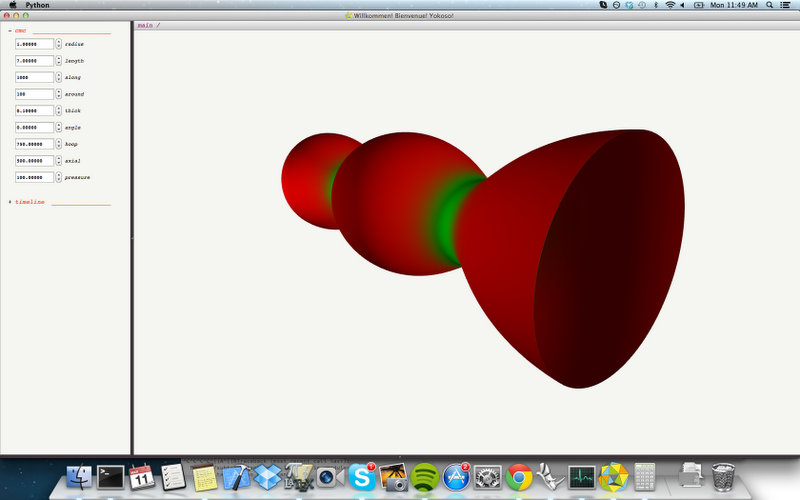
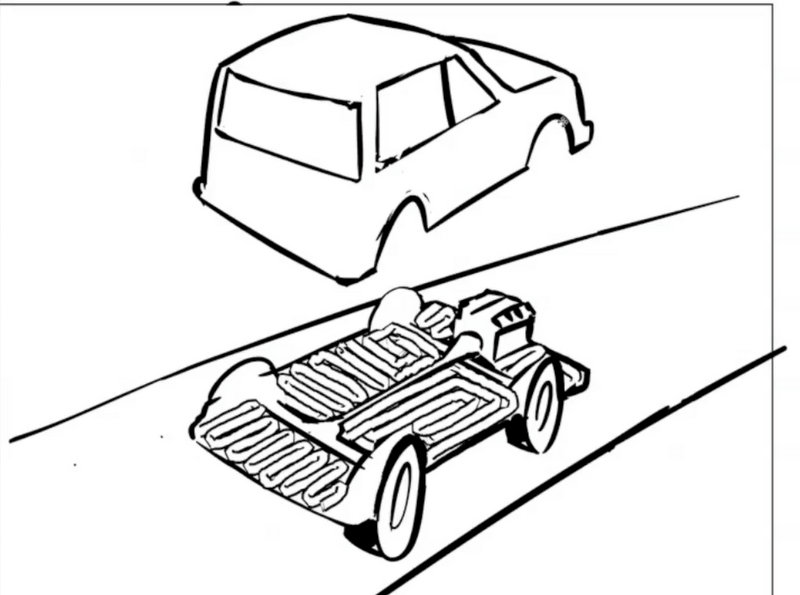
Compressed natural gas (CNG) is 1/2 as potent of an emitter of greenhouse gases, and is much more readily available within the US. In spite of lower fuel costs, adoption of this fuel source has been slow. This is mainly due to a lack of infractructure, and the low conformability of pressure vessels. Fitting a CNG tank into a car is fitting a circular peg into a square hole . At Otherlab, I helped create a tank that is made of many tiny tubes wound into a shapefilling curve.
The curvature of a cylindrical pressure vessel's walls dictate that wall-thickness is proportional to the tube's diameter. It was this insight that led to the idea of using a long, small-diameter tube to hold the same amount of gas without any first-order losses in energy density. However, connecting the tubes becomes a major design consideration when their number grows to be great. I worked with Geoffrey Irving to use membrane stress theory to determine optimal curves for connecting sections of tube without inducing any stress discontinuities and minimizing volume loss from end-fittings.
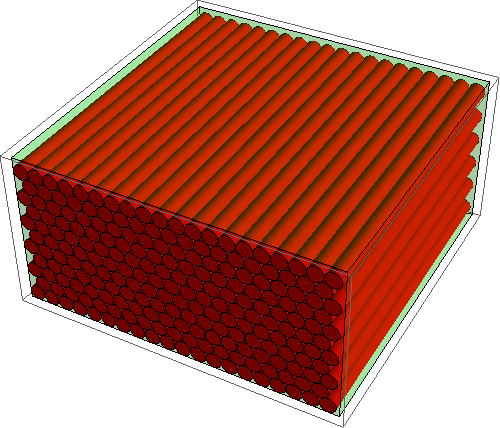
There are many different geometries for using continuous cylinders to fill a volume. We generated several design spaces and examined the physics and manufacturing considerations behind each design to select optimal design spaces to work within as we refine our designs for manufacturing.
Current robots are typically inappropriate for human interaction because they are heavy, expensive, and dangerous. Robots that interact with people require force-feedback motion control which adds to their cost, and need to move at reduced speeds to keep them from accumulating too much kinetic energy. At Otherlab, I helped make safe, fast, and low-cost robots by replacing rigid metal actuators and structures with inflated volumes.
Dialing in the fabrication process for creating inflatable robots without outsourcing to a major facility makes for challenging work. At Otherlab, I had the opportunity to contribute by cutting bladders and patterns by hand, sewing up structures, and stuffing the bladders and volumes into the correct configuration.
Designing 2D patterns for 3D objects is one of the major challenges to creating efficient and effecive inflatable robots. At Otherlab, I designed patterns for parabolic solar concentrators (Credit to Omari Carrasquillo for the idea and design of the model), bouyant bicycle supports, and an inflatable spine/actuator.
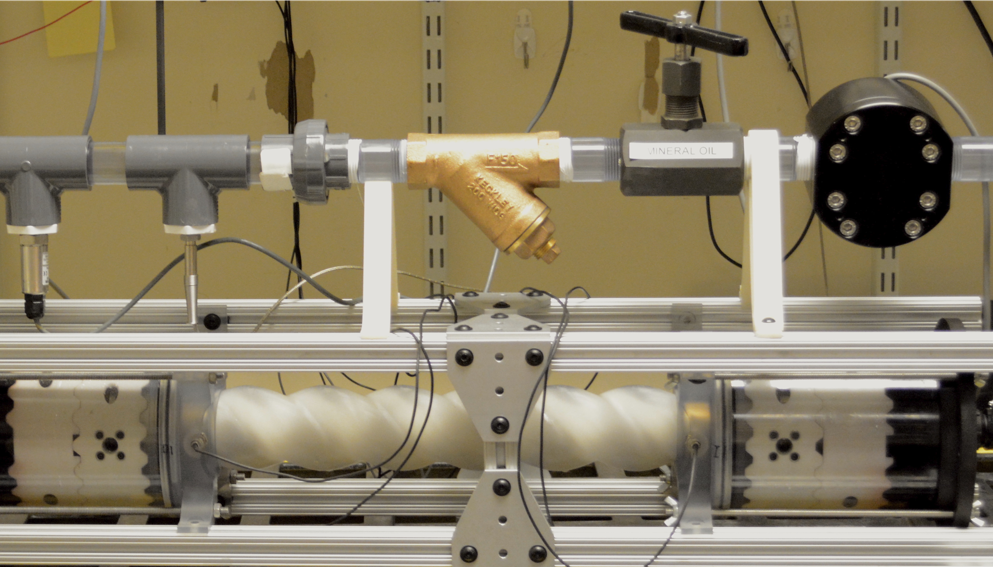
Existing pneumatic systems are inefficient in highly articulated applications because they must vent excess pressure to have proportional control. This means that an application that requires 20% of the system operating pressure will be 20% efficient with a traditional fluidic system. At Otherlab, I worked to create low-cost, lightweight pumps that can be used to create a highly efficient distributed fluidic system.
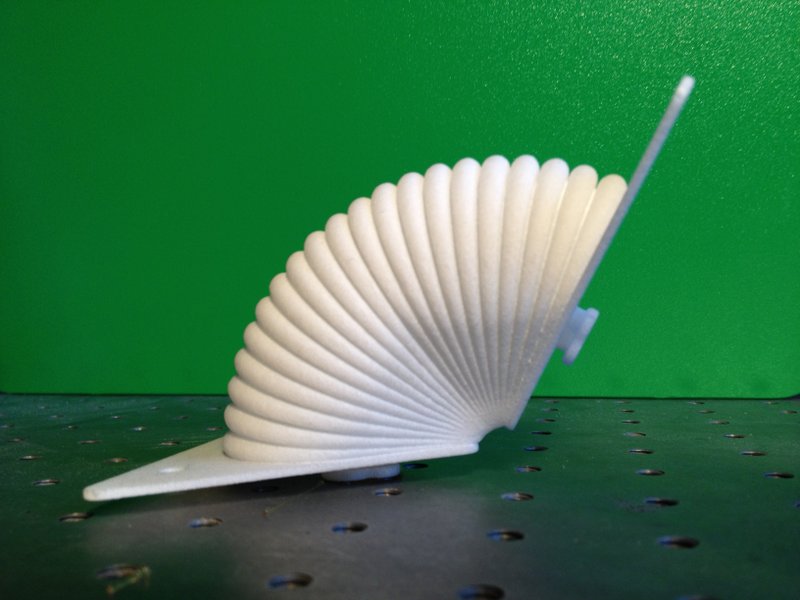
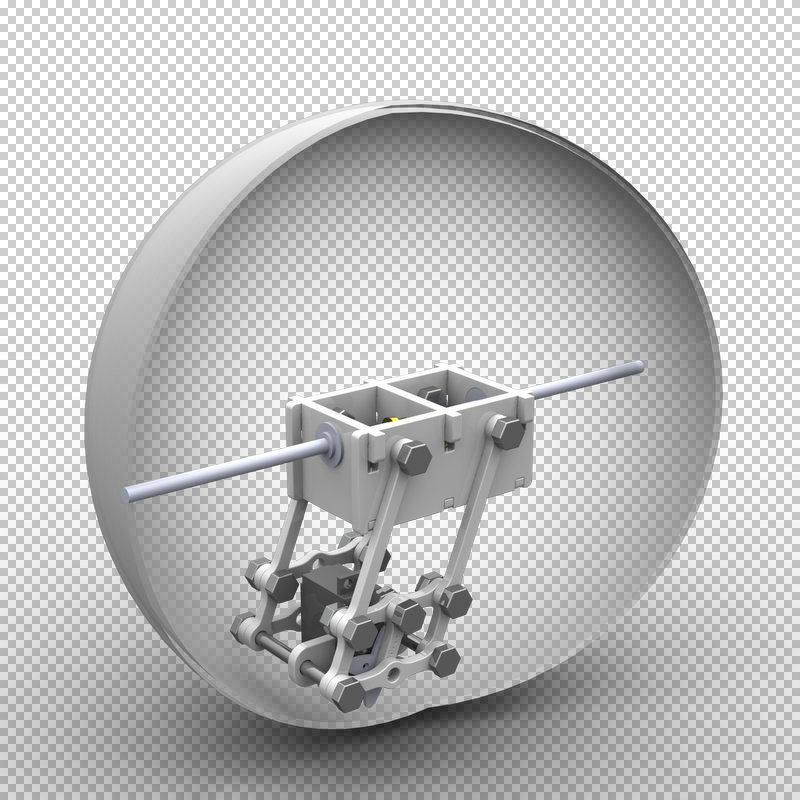
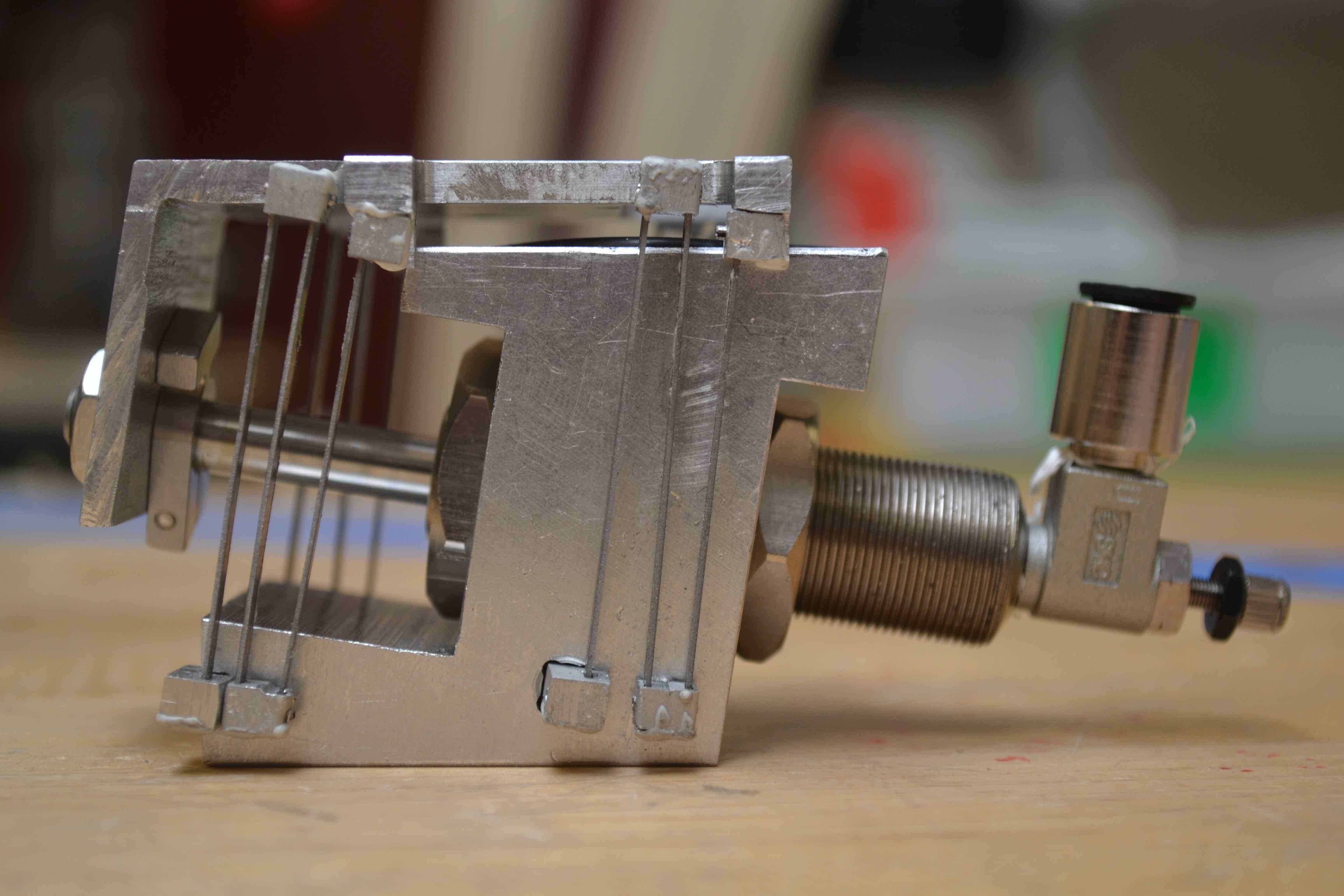
Peristaltic pumps have the potential to be very efficient at low costs because they naturally have high volumetric efficiency since the fluid never leaves the tube that it is in. Peristaltic pumps are currently limited by the low pressures and high friction wear on weak tubes constantly being rolled on by the pumping mechanism. I developed peristaltic pump prototypess that are designed to work at high velocity with limited wear by adding compliance to the rocking mechanism.
I designed and fabricated the pump below in two weeks as a proof of principle. This design could lead to preisaltic pumps with longer lifetimes because the rings on the outside are able to travel with the tube as it expands and contracts during operation.
Not only is the application of autonomous mechanical systems to wind-driven maritime platforms a fun problem, it is also one worth working on. This technology could enable wind-powered ocean monitoring platforms that can go on arbitrarily long expeditions or wind-powered sea transport. At Olin college, I was a part of our team's first year of competing inSailbot. We went from having no boats in September to creating two 2-meter automous sailboats by June when we took second place in the international competition in Vancouver.
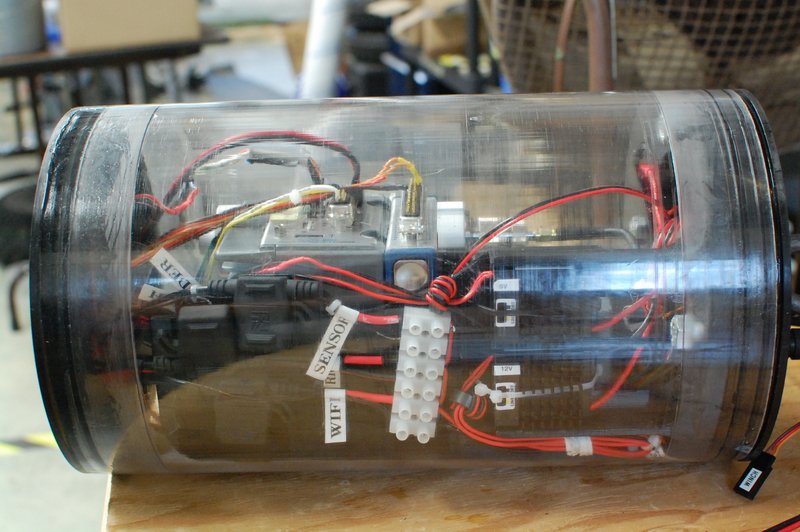
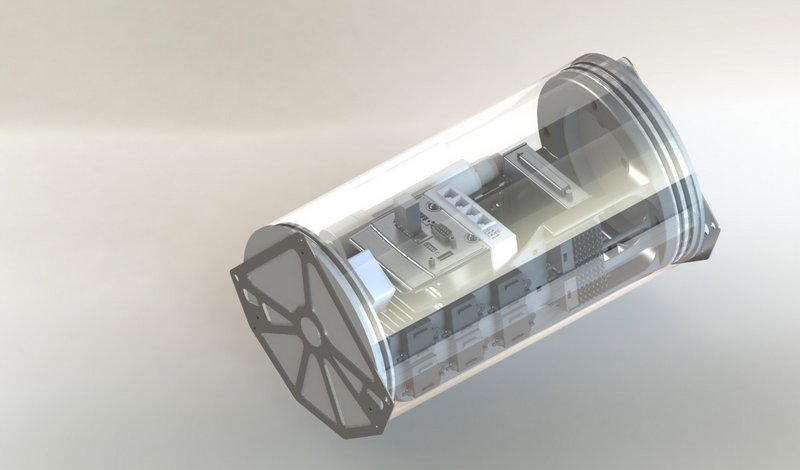
For my first few months on the team, I led the electronics housing subteam. Our goal was to create a small housing that held the electronics components in place, was watertight, and could be easily accessed. Since a leak in salt water would likely destroy the cRIO on board, we had to be certain that our housing would not leak. We chose to use a sled that slid into and out of a double O-ring sealed polycarbonate chamber. Further into the project, we were given a sbRIO from our sponsors at LabView, enabling us to use a much smaller, off-the-shelf NEMA IP6 housing.
After the electronics housing subteam finished creating a watertight electronics housing, there still remained many tasks to be done. We helped in rigging, laying the hull up, mounting sensors, and water-proofing the hulls of both boats as we tested and got ready for competition.
As Sunfolding moved into Otherlab's 3rd floor in the Organ Factory, we decided that the project needed a monolithic storage space. Since lab space aesthetics is important to us, I set out to design and create an 8' wide, 14" deep, and 12' tall shelving/drawer unit to store the project's supplies.
I designed the shelf in Autodesk Inventor and converted it into a set of plates with algorithmically placed finger joints using Otherlab's in-house computational geometry software.
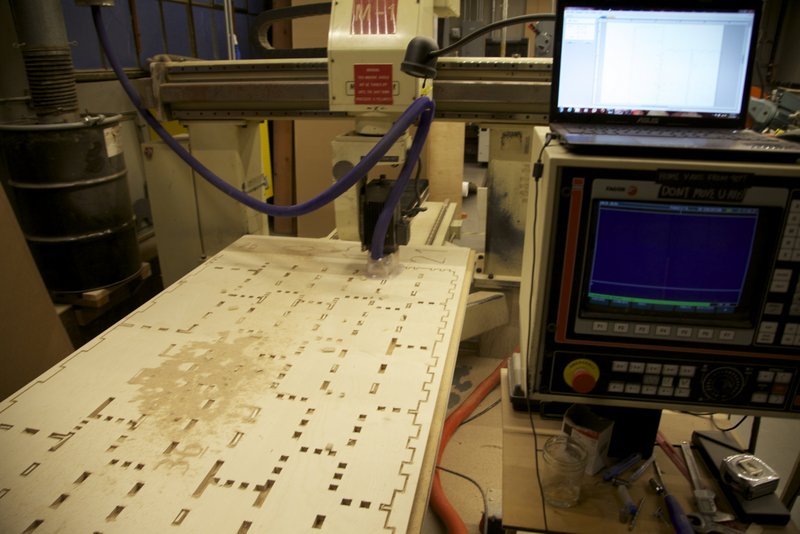
I cut the material for the shelves out of 400 square feet of plywood on our 3-axis Motion Master router using V-Carve Pro CAM software.
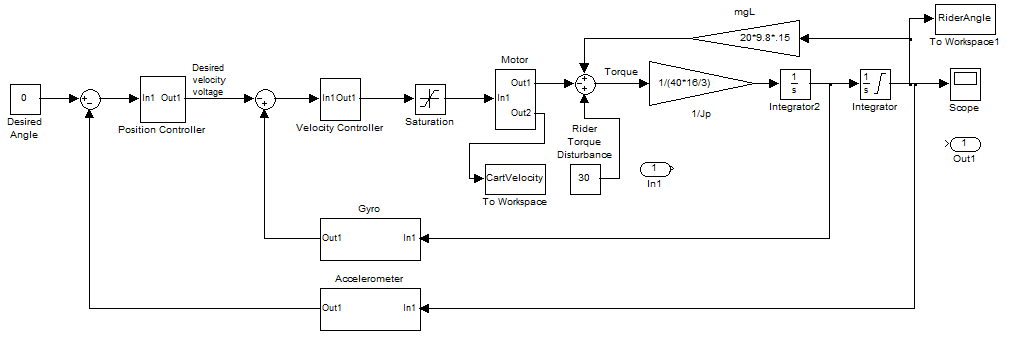
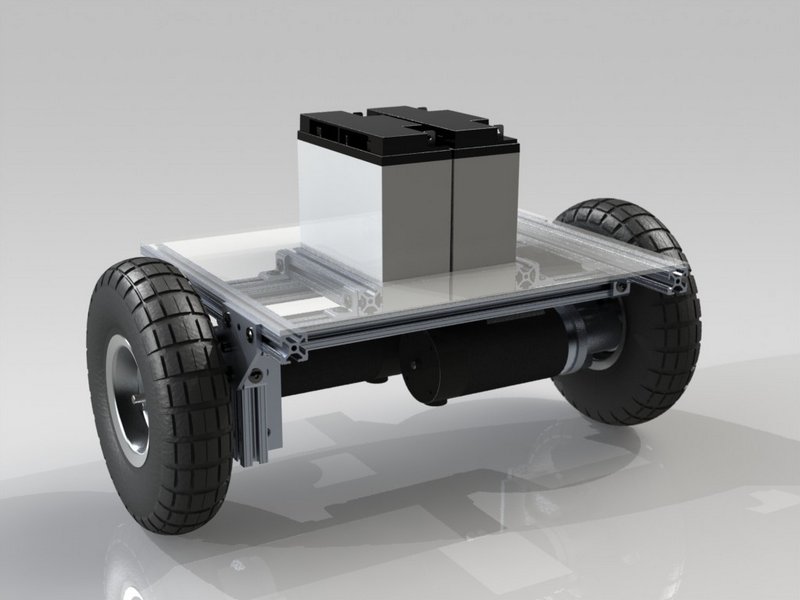
How hard can it be? For the final project in my controls class, I worked with two friends to convert two wheelchair motors and a motorcycle battery into a rideable segway. We did get the segway to balance for a whole minute, but were unable to get it into a rideable state. This likely due to the size of our motor which disturbed our unprotected circuit. The addition of a low-pass butterworth filter that was strong enough to remove this noise increased the time delay enough to make our system unstable.
To control the system we began with an inverted pendulum in simulink. We modeled the rider as a disturbance torque. As the rider leans forwards or backwards, he or she causes the motors to move the base of the segway under the new torque. Through this mechanism, you can drive forward by leaning forward, backwards by leaning backwards, and balance in place as well. Since the mass and moment of inertia of the system cannot easily be set ahead of time (each rider would have a different height and weight), we added a second, minor feedback loop to further desensitize the system to changes in inertia. As an additional challenge (mostly to Erik Kolker, our resident ECE), we decided to use an analog circuit to manage our feedback
To hold the system together, we made a platform out of 80/20 with a polycarbonate sheet on top. The battery was held, clamped in place by two peices of 80/20 below the polycarbonate board. The mechanical system had too much slop in the motor and battery mounts, and additional clamping would be recommended for a second iteration.
My senior year at Olin, my friend Boris Taratutin and I decided to undertake a series of experiments in entreperneurship. The idea was to come up with ideas, and implement them rapidly with the goal of developing the basic skills associated with bringing products to people. We specifically chose spaces that we were passionate about in order to also focus on using entrepreneurship as a chance for us to share what we value with other people in a scalable model.
Tea is one subject that we are passionate about. Through marketing coldbrew mate as an energy drink and normal coldbrew tea as a less potent version of mate, we were able to quickly create a sustainable (but not scalable) business provising coldbrew tea based energy drinks to other students. We sold over 200 bottles of our tea in custom labelled mason jars and broke even within a few weeks of beginning the venture.
We also ventured into custom engraved clioboards (for our love of organization) and t-shirts (for our love of silliness) as two other business projects. The custom engraved acrylic clipboards were a success, wheras the shirts were a complete flop. With the shirts, we made the mistake of ignoring low pre-order volumes and went ahead with our idea because we were still excited about it. After the shirts arrived, we had trouble selling them, and ultimately the box was stolen because it was left untended for too long. At the end of the day, the success of the clipboards was about equally balanced by the failure of the shirts.
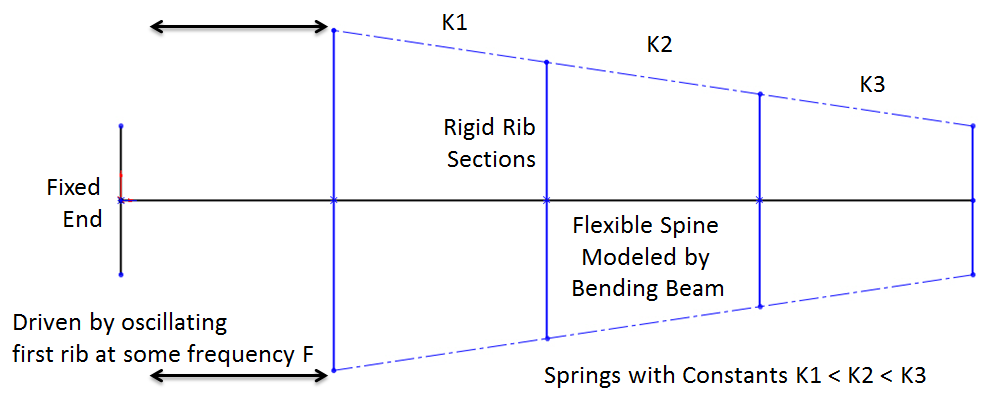
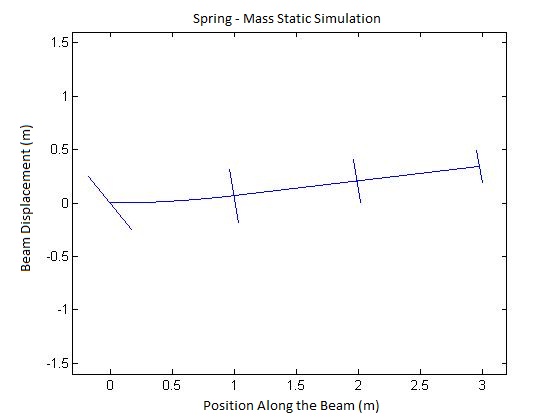
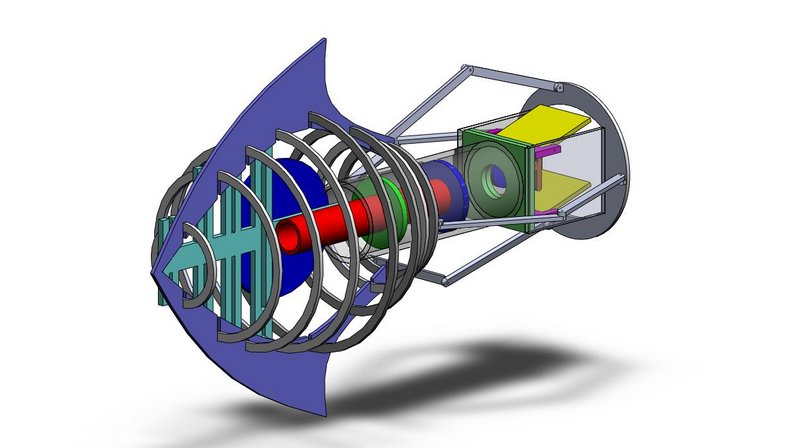
For my partial differiential equations class, I worked in a team of three students to numerically and analytically analyze a biomimetic mechanism for tail-based underwater propulsion. Underwater robotics is a popular research topic at Olin, and we were using the project to build on some of the team's experience and explore new design possibilities.
After analytically solving the differiential equation, we implemented a time-step based fourth-order central difference ODE solver to find for the dynamic behavior of the tail. At the boundary conditions, we derived and implemented ghost points to set the boundary values accordingly.
The proposed locomotion mechanism that we were examining was a beam-spring coupled tail that was driven at the base of the tail. We solved for the effective resonant frequency of the spring system to run the model at the resonant frequencies to see if motion of increased amplitude resulted.
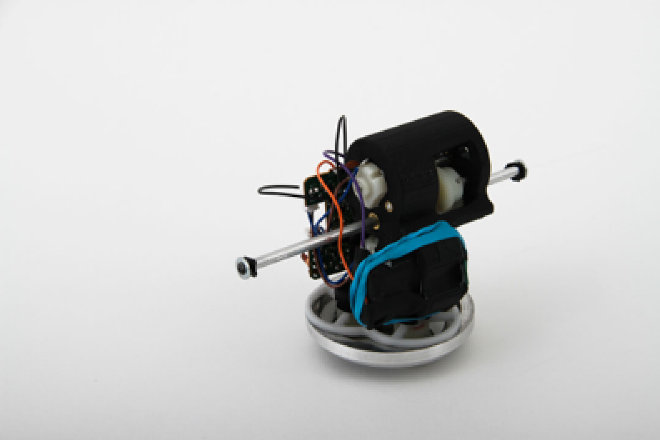
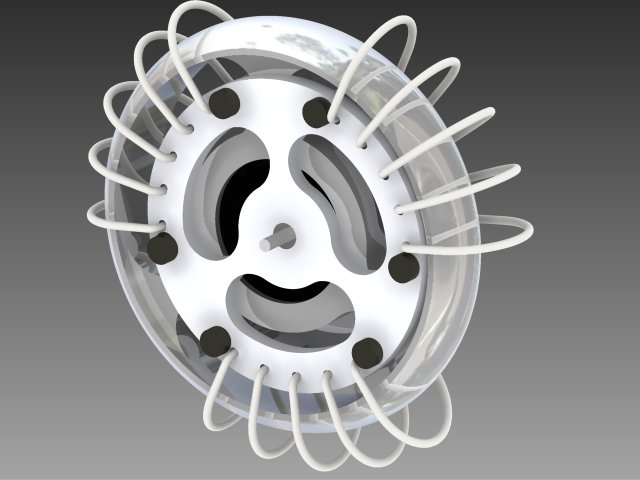
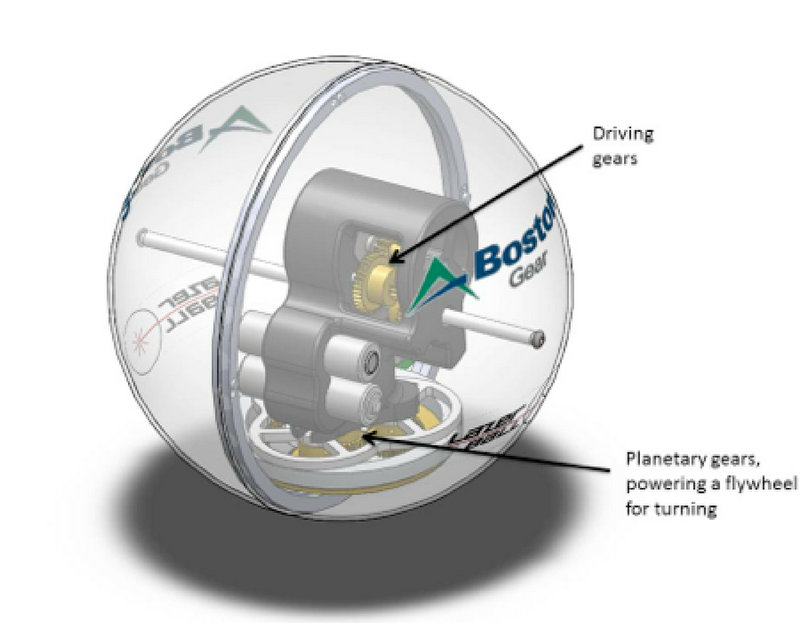
"Wouldn't it be cool if we had a remote control ball?" was the line that made for the first remote control ball that I would work on. While at Olin I made two remote control balls. One for an introduction to mechatronics course ('Ultra Ball'), and the other as a final project for a mechanical design class ('Laser Ball').
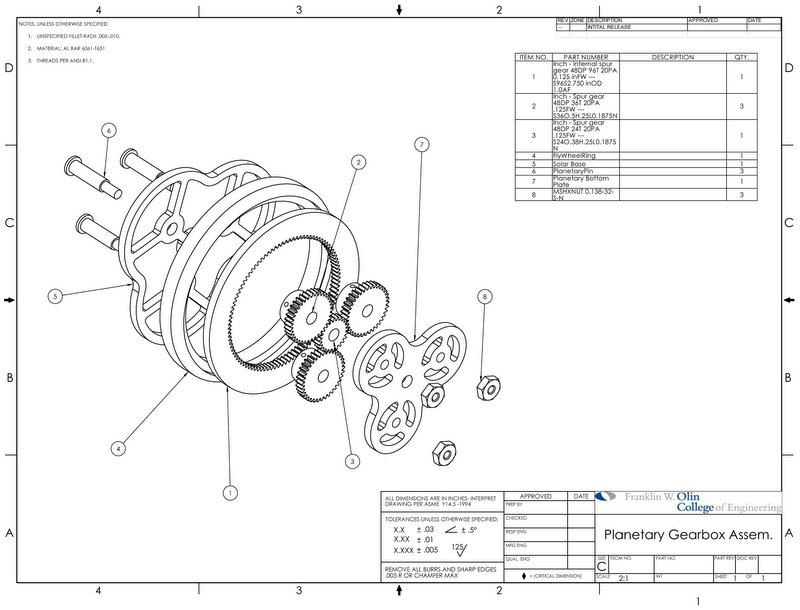
With the Laser Ball project, I worked to design and select the overall mechanical architecture. Once the architecture was selected, I designed and fabricated the planetary gear drive for the flywheel which was intended to steer the ball. Once each team member has finished their designs, I continued collaborating with part fabrication and assembling the ball. To keep the project purely mechanical, we used a remote control and hobby motors cannibalized from a toy.
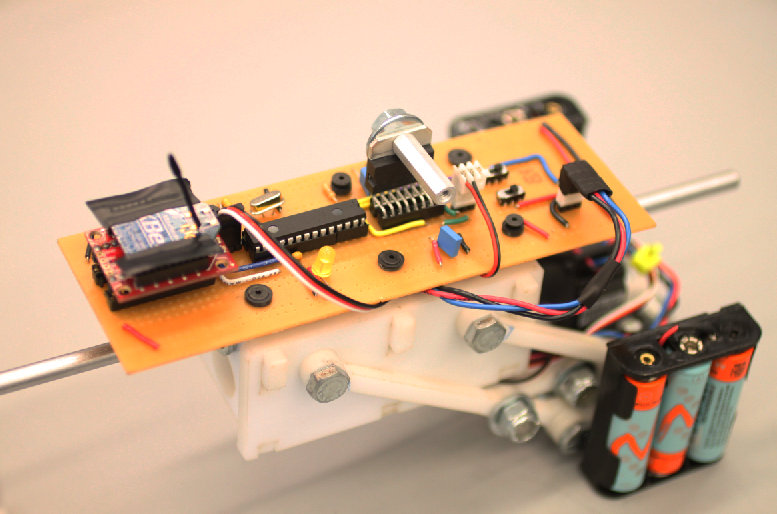
Since the Ultra Ball was for a mechatronics class, I decided to strengthen my skills with electronics. While I did contribute to the mechanical design and fabrication, the bulk of my work was writing code for the PIC microcontroller, writing a python based interface for controlling the ball form a laptop, and configuring the xBee wireless device to communicate between the laptop and PIC.
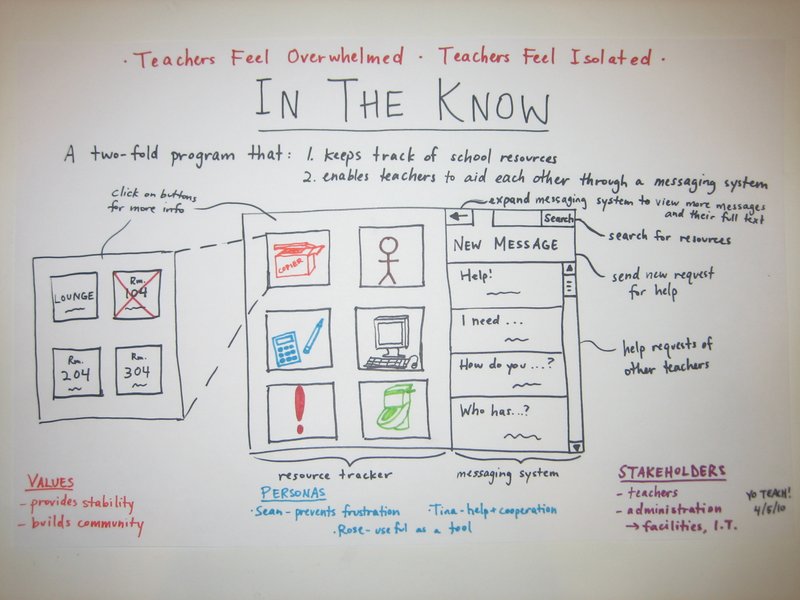
User Oriented Collaborative Design is part of Olin's core curriculum. It is a semester-long project to study a specific group of people with the goal of understanding some of their values, and designing/co-designing a product or service to meet some need or area of opportunity. My team worked with highschool teachers in Boston's inner-city. After many user visits, ideation sessions, and codesign, we decided to do the conceptual design for a resource sharing platform called "WeShare." "WeShare" connects teachers in low-resource environments to turn a culture of scarcity into a stronger community that shares its precious resources to enable teachers to be more effective with their precious time. Our conceptual design can be found here.
Our first task on the road to deciding which problem to solve was learning as much as we could about the teachers. To do this, we shadowed them in the classroom, interviewed them in the classroom and outside of the classroom, and participated in volunteer work at their schools. After each session, we compiled what we learned as a team and worked to distil the essential information. Ultimately, we used our distilled information to create personas - abstractions of our users to guide us in the idea generation and refinement phases of the project. Our final persona poster can be found here
After we generated a sense of the problem that was adequate to move forward (certainly in no way a perfect one), we focused on designing a product or service for these teachers. We began with ideation techniques like brainstorming and word-mood card synthesis, and moved on to clustering the ~100 ideas that we had generated into groups to define the basic insights that would guide the design track for each insight. Those insights were turned into rough dieas that were refined and eliminated until on final idea remained: "WeShare".
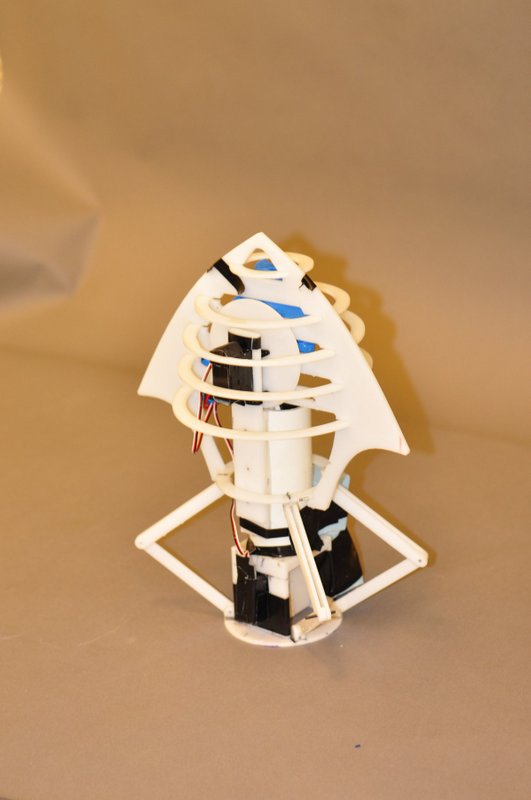
Design Nature is one of Olin's first semester introductory courses. The firs thalf of the semester, students design a hopping toy that is inspired from nature. The second half of the semester, students work in a team to create a toy that emulates the swimming motion of a creature. My team worked to create a squid toy (team "Squid Speed").
Since this was the first mechanical design project of college, it served as an introduction to using CAD as a collaborative tool. It was very important to our team to make sure that the squid's signature expansion and contraction was coupled with our propulsion system. This was accomplished by coupling the bottom and top plates of our pump with a variation of the sarrus linkage which both expanded and contracted, and made ensured that the two plates remained parallel. We worked as a team to generate concepts, divide design tasks, and CAD up the body and pumping mechanism.
We had our parts laser cut in the machine shop, and then assembled the squid using built-in snapping mechanisms and press-fits. Another team member sewed the skin seen in the pictures below.